SubTopics
This page has many examples of small, single or tandem occupant enclosed vehicles that are relevant to designing the sort of vehicle I’m postulating. They’re all concepts or failed attempts at production vehicles. None of them are quite right but they all have something to teach us. Some of them, like the vehicles pictured in this slide, have four wheels.

Having four wheels means these vehicles are legally cars, which means they have to pass the same crush standards as a Chevy Suburban, which undermines the whole point of trying to take advantage of this small, lightweight platform in the current regulatory environment. It’s entirely possible that once autonomous technology becomes ubiquitous, crush standards will be minimized or even abolished as explained in the Automotive Design Changes section, but for now, having four wheels means the vehicle is a non-starter as a Cabin Commuter.
To take advantage of the small form factor, it’s most advantageous for the vehicle to functionally be a very narrow car but legally a motorcycle, because that removes the majority of the regulation to which motor vehicles are beholden. In order to be a motorcycle, the vehicle has to have fewer than four wheels, like these tricycle designs.
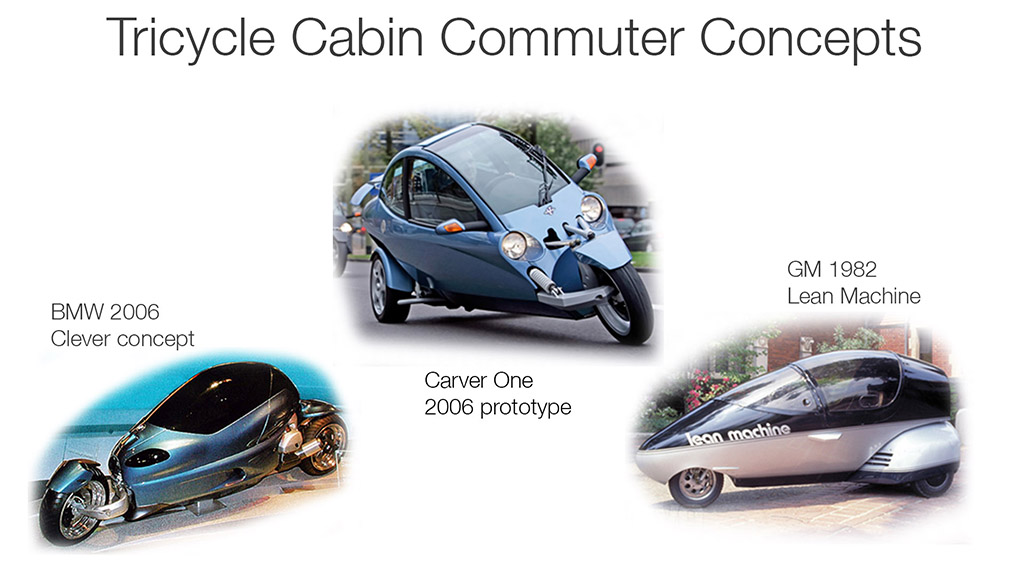
The problem with this form factor is that having the single wheel in front means that the two most important primary forces on the vehicle are being handled by the single front tire’s contact patch, rather than two rear tires’ contact patches. To be more specific, there are three vectors of motion a vehicle is subject to; cornering, acceleration and braking. On a motorcycle, braking and turning are primarily handled by the front wheel. The rear wheel is just along for the ride until it’s time to accelerate and then its contact patch becomes far more important. We’re trying to design a high efficiency (and not necessarily high performance) vehicle, however, so we’re not overly concerned with acceleration. Cornering and braking are of paramount importance for any vehicle, though, so the front contact patches are much more important than the rear contact patches. Because of this, if we’re using three wheels, a reverse tricycle, like these designs in the slide below, is the more successful layout.

The problem with these is that some of them (Peugeot LiiON concept, Elio Motors concept, Campagna T-Rex, BMW i1 concept) have H-points far too low for mainstream consumer appeal. In industrial design, the H-Point refers to the location of the occupant’s Hip axis, and having a low H-point means the vehicle is too low and sporty for the intended application. As a performance enthusiast I love a low H-point on a vehicle but it’s not appropriate for a mass produced, mainstream commuting vehicle. All of the other vehicles other than the Peugeot HYmotion and the Toyota iRoad are also too wide to realistically split lanes and therefore aren’t taking advantage of one of the fundamental benefits of single occupant vehicle architecture. I can’t stress enough how important this is, especially in the early days of The Mobility Cloud when the roads are still mostly full of full size vehicles. Finally, some of the vehicles aren’t fully enclosed (Campagna T-Rex, Piaggio HYMotion) which means consumers won’t accept them for the same reasons they won’t currently accept motorcycles as a mainstream solution.
The only vehicle in this group that gets the form factor and packaging right in my opinion is the Toyota iRoad. The design is successful because it’s narrow enough to split lanes and it has an upright, comfortable seating position like a car. Toyota has announced they’re going to build a hundred or so of these in a pilot program to test out the iRoad’s suitability for last mile transportation in city centers. The problem with this vehicle is that it only has two 2.7 hp electric motors and consequently is not freeway capable so it’s not a solution to the larger transportation problem I’m trying to solve.
Finally, there are two vehicles that don’t fit into any of the previous categories that bear perhaps a closer look than any of the other aforementioned vehicles because one is actually available for sale and the other one allegedly will be in a couple of years and is a superior design. The first vehicle is the electric Peraves Zerotracer.

In 2010 this company took their design and entered it into the Progressive Automotive X-Prize, which was a contest for fuel efficiency. Despite the fact that this vehicle was street legal in Europe and it was competing against purpose built, laboratory grade science experiment vehicles, most of which couldn’t possibly be registered for use on a public road, this design won both its category and the contest’s overall grand prize. A basically identical production version of the contest-winning X-Tracer model, called the ZeroTracer, subsequently drove around the world in 80 days. It should also be mentioned that the production electric ZeroTracer is based on a thirty-five year old similar gasoline design called a Monotracer. The Monotracer takes all the mechanical bits out of a BMW gasoline touring motorcycle and installs the running gear in the cool aerodynamic shell pictured above. The white vehicle in the slide is actually a Monotracer, as evidenced by the visible exhaust pipe. Peraves took their gasoline design and retrofitted it for electric power to create the X-Tracer that won the X-Prize. How did it beat so many purpose built vehicles when this was a street legal, electrically retrofitted, decades old gasoline design? It did it because this sort of aerodynamic, single occupant width vehicle is so fundamentally successful for fuel economy that its form factor simply couldn’t be beaten, despite the vehicle’s technical disadvantages.
All that being said, this is not the right design for what we want to do. The ZeroTracer is enormous. It has a large, comfortable rear seat and even a large trunk over the rear wheel. Also, this is a two wheel motorcycle where the user can’t put their feet down, and even if they could, the vehicle weighs twelve hundred pounds so the driver couldn’t possibly hold it up with their legs from a reclined seating postion. To solve this dilemma the vehicle has training wheels that must be deployed manually at stops, which is a very kludgy and inelegant solution. This vehicle is for sale in gasoline and electric format and it’s not mass produced and so costs between $100K and $125K. This is a very intriguing design, but it’s not a solution for single occupant transportation in The Mobility Cloud.
Finally, we come to the Lit Motors C-1, which is being designed right here in my home base of San Francisco, CA.

This is also a two wheel enclosed motorcycle, like the Peraves design above. The first major difference between this and the Peraves design is that the Lit C-1 is a purpose-built, totally original design. The Peraves is a rebuild (albeit a major one) of an existing motorcycle design and as such has to live with major design compromises like the need for the training wheels. Speaking of stability, another major difference between the ZeroTracer and the C-1 is that the C-1 will use gyroscopes to stay upright when it comes to a stop.
Note that the C-1 packaging also has room to squeeze a second passenger in behind the driver in a pinch. The overall thrust of this website is advocating for single occupant autonomous vehicles, but given that the C-1 will be a human controlled vehicle that will initially be sold in the current automobile market rather than for use in The Mobility Cloud, I think Lit has made a good decision adding this extra capacity. I say this because this means it’s easy to pick a child up from school, or take an adult briefly across town, or, more often, when there isn’t a person sitting in the rear seat, that’s enough room for a carry-on sized bag and a personal bag or a half dozen bags of groceries. Having just that extra bit of utility I think will be of great value for a human controlled vehicle that has to be sold in our current market prior to the advent of The Mobility Cloud. All this adds up to Lit being the closest to the mark with the human packaging and product intent for a vehicle that’s going to be sold prior to the incorporation of autonomous technology.
I want this vehicle to be successful but I have one modest and one major concern about the design. The modest concern is that the gyroscopes do not store energy and consequently take up space that could otherwise be used for batteries in a vehicle that already has very little internal space for the required battery volume. As flywheel battery technology progresses, perhaps the loss of energy storage volume will be mitigated eventually if Lit can evolve the gyros into energy storage devices, but for now this will negatively impact the vehicle’s range. Finally, the thing I would be most concerned about if I were an investor in this company is the fact that gyroscopes are mechanical devices with moving parts and consequently, an associated statistical failure rate. If Lit sells enough C-1s, eventually that failure rate will manifest itself. If Lit successfully sells several thousand or tens of thousands of C-1s (and I hope they do that) I would be concerned if I were an investor about a day when a C-1 user is coming across the Bay Bridge, Brooklyn Bridge or other major commuting artery with a malfunctioning gyro assembly. As the vehicle slows for traffic with a malfunctioning gyro set, instead of gliding to a stop and remaining upright the vehicle will simply fall over. Considering that every commuter driving by has a video camera in their pocket and a Facebook and/or Youtube account, I would be concerned about a video of this going viral on the internet. This scenario has all the making for viral penetration into our society. It’s a “car” crash, it involves a weird vehicle that many people may not have ever seen before and it involves public safety. Sensationalism-driven news outlets like 60 Minutes will have a field day with it. I hope that this does not happen but if I were an investor in Lit Motors my primary concern would be the fact that this vehicle relies on technology to keep it upright and stable at all times rather than something more reliable like the fundamental laws of physics.
Finally, I should mention that this entire page of analysis is geared toward what form factor and packaging would be appropriate for a Cabin Commuter if we were going to start building one right now, today. It’s entirely possible that in a decade or two autonomous technology is going to cause many of the crash regulations that cars are currently subject to to be minimized or even abolished as described in the Automotive Design Changes section. If that happens, then four wheel designs like the Lumeneo Smera and NARO will become the more appropriate architecture, because at the end of the day, four wheel are safer and more stable than three wheels. The Commuter Cars Tango ostensibly falls into this category as well, but its stability requires an enormous battery mass in the bottom of the vehicle which may not be necessary or fiscally efficient in The Mobility Cloud.
